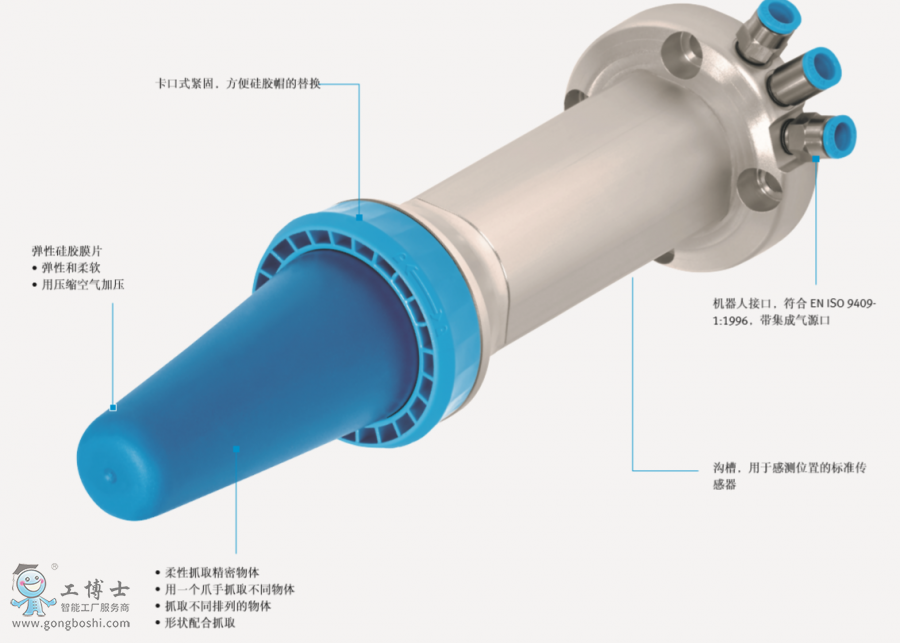
festo完美抓取,形狀自適應爪手 DHEF
大自然賦予靈感的抓取技術 – 形狀自適應爪手的工作原理基于變色龍的舌頭。形狀自適應 爪手可一次完成不同形狀物體的抓取、采集和放置,無需人工改動。
大自然賦予的靈感 形狀自適應爪手,顧名思義,就是本身能自適 應不同的形狀。在大自然中,變色龍捕食昆蟲 時彈射出的舌頭就是這種力與形狀配合獨特組 合的*佳詮釋。一旦變色龍在視野中發現獵 物,它的舌頭就像一卷膠帶那樣翻卷而出。在 舌尖碰到昆蟲前,舌頭的中段開始回收,而前 沿仍保持向前。這讓舌頭能適應獵物的形狀和 大小,并緊緊地裹附住。獵物被粘在舌頭上, 舌頭像釣魚線一樣被卷回。2015 年,與奧斯陸 大學緊密合作下開出了形狀自適應爪手的** 版本。
得益于逆變特性實現形狀配合 硅膠帽自身翻折裹附在待抓取物體上,從而形 成牢固的配合。彈性硅膠可實現對不同幾何形 狀的**調節。 形狀自適應爪手與氣缸的組合可實現高能效、 高可靠性抓取。*終,為自動化核心業務推陳 出新。
豐常適用于未來工廠,得益于許多不同的抓取選項,形狀自適應爪手在未來的生產場景中占據著一定位置。 其功能集成時系統和元件在未來對不同產品和工作形成自適應的一種方式。該項目還展示了,Festo利用自然中的例子為自動化核心業務推陳出新的犀利眼光。
優勢和創新特性
●待抓取物體的自適應能力
●抓取任意物體的靈活性
●減少更換爪手的工裝切換時間,從而提高生
●產效率
●重量輕,結構狹長
●安全的人機交互


 在線客服
在線客服
 企業微信
企業微信








 [VIP第6年] 指數:1
[VIP第6年] 指數:1 通過認證
通過認證